
第10课:形态决定功能——为什么机器人长得不一样?
【学习目标】
1. 了解现阶段具身智能机器人的主要形态及发展方向
2. 理解具身智能的物理形态与功能实现的内在关联,能结合场景分析形态设计的合理性
3. 培养基于任务需求设计具身智能形态的初步思维
【情境导入】
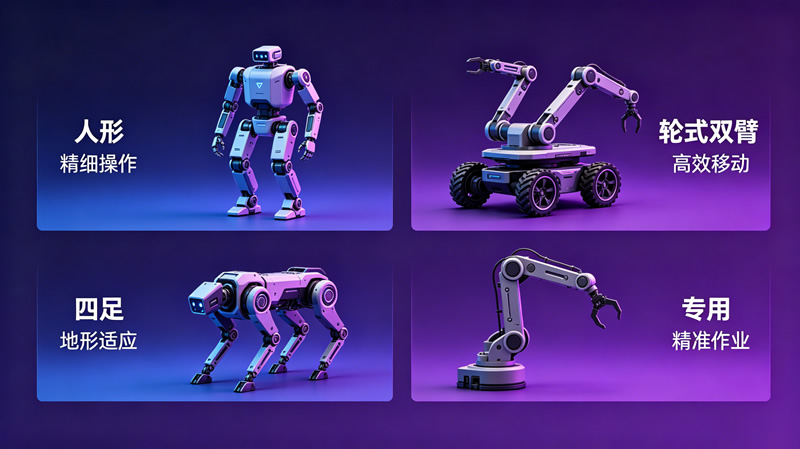
在家庭场景中,人形具身智能机器人灵活弯腰捡起地上的玩具,抬手打开柜门;在应急救援现场,四足机器人稳健地穿越坡塌的碎石堆;在智慧药房里,轮式双臂机器人凭借稳定的底盘在货架间穿梭,用灵巧的机械臂精准抓取药品。这些具身智能的物理形态各异,为什么有的像人类,有的像动物,有的则是完全定制化的结构?形态的差异背后,隐藏着功能实现的关键逻辑。
【知识大揭秘】
概念引入:形态适配功能
具身智能的物理形态并非随意设计,而是遵循“形态适配功能”的原则,即根据任务需求、应用场景等特点,设计更匹配的身体结构、移动方式和操作部件。就像运动员选择不同的跑鞋来适配不同的赛道,具身智能也需要不同的“身体”来适配不同的任务。
深度解析:四种典型形态
案例时间:从校园到救援——形态与场景的匹配
知识小结:形态与功能的关系
【AI看图学】
【动手练一练】
活动:设计你的具身智能机器人
活动目标:通过实践活动深化对本课知识的理解,培养动手能力和分析思维
步骤:
1. 从三个场景中任选其一:校园实验器材搬运、社区宠物粪便清理、残障人士户外辅助
2. 设计具身智能机器人的物理形态:移动方式、肢体结构、整体尺寸、搭载传感器
3. 说明设计理由:为什么这样的形态能适配该场景
4. 小组分享设计方案,全班讨论优化
工具/平台:纸笔或PPT、绘图工具
预期成果:具身智能设计方案,包含形态设计图和设计理由说明
【想一想·辨一辨】
1. 未来的具身智能会不会像“变形金刚”一样,可以根据任务需求改变自己的形态?你觉得这可能吗?
2. 人形机器人一定比其他形态更好吗?在什么场景下其他形态更有优势?
【拓展阅读·前沿视窗】
了解“软体机器人”的前沿研究,它们用柔性材料制成,能像生物一样改变形状。关注国产人形机器人“天工”系列的发展,思考人形形态的优势与挑战。机器人设计师是这一领域的核心职业。
学完本课了?来检验一下学习成果吧!
🎯 去练习


