第7课:机器如何“动手”?——从机械执行到灵巧行动
【学习目标】
1. 理解具身智能的行动是将决策指令落地为物理动作
2. 能够通过实践操作体验智能设备“指令—动作”的联动模式
3. 分析传统智能设备行动与具身智能灵巧行动的本质差异
【情境导入】
无人驾驶汽车通过感知实时交通环境,自主调节行驶方向与速度;智能康复机器人基于患者的动作反馈,动态调整辅助力度;智能物流分拣机器人在感知包裹材质与重量后,自适应调整抓取力度以稳定运输。这些“灵活应变”的物理动作,不仅需要执行预设指令,还需要实时应对环境变化与任务目标。
【知识大揭秘】
概念引入:行动——决策的“落地执行者”
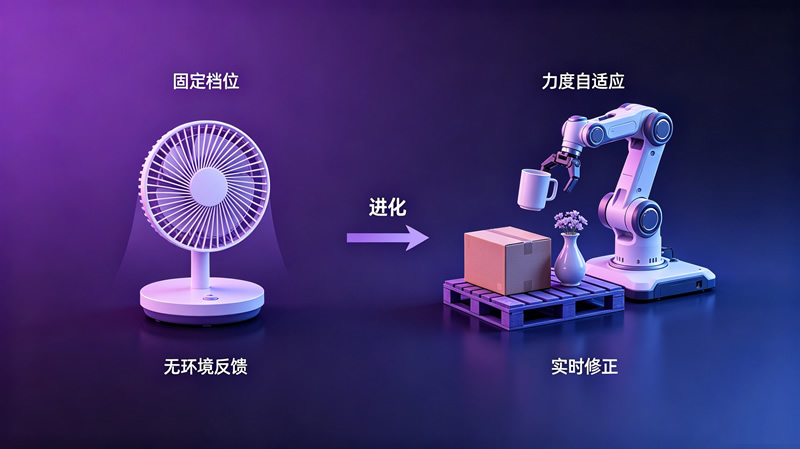
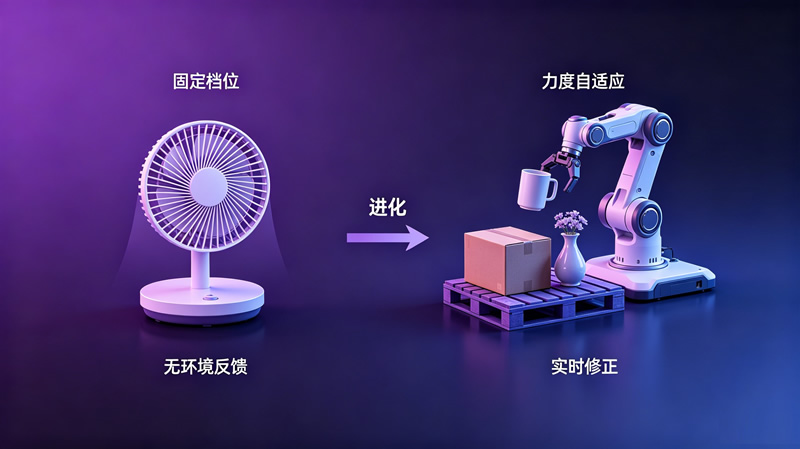
具身智能的行动能力是其与现实世界交互的最直接体现。传统智能设备的行动建立在“固定输入—动作输出”的基础上,输入与输出之间为固定的逻辑关系,无法根据环境变化自主调整。具身智能的行动则能将决策动态转化为适应实时环境的物理动作,并结合强化学习等机制持续优化行为策略。
深度解析:两种行动的三大差异
案例时间:农业植保机器人的“一机多能”
知识小结:行动的进化之路
【AI看图学】
【动手练一练】
活动:按键控制风扇 vs 手势识别控制风扇
活动目标:通过实践活动深化对本课知识的理解,培养动手能力和分析思维
步骤:
1. 实验一:用按键控制风扇转速(低速/中速/高速/停止),观察风扇在出风口被阻挡时的反应
2. 实验二:用手势识别模型(OK/握拳)控制风扇开关,对比两种输入方式
3. 分析两种方式的行动逻辑是否有本质区别,讨论具身智能行动的特点
工具/平台:智教实验板、按键传感器、人工智能实验模组、风扇、数据线
预期成果:实践记录表,包含两种控制方式的对比分析
【想一想·辨一辨】
1. 如果让你设计一台“智能烹饪机器人”,它需要哪些灵巧行动能力?试从“动作执行”“环境响应”“任务适配”三个角度分析。
2. 人类的手能做出非常精细的动作,机器人的机械手能赶上人类吗?你觉得最大的挑战是什么?
【拓展阅读·前沿视窗】
了解“灵巧手”(Dexterous Hand)的研究进展,它是具身智能行动执行的前沿方向。机器人操作员和机械设计师是设计具身智能行动系统的关键职业。
学完本课了?来检验一下学习成果吧!
🎯 去练习


