第5课:机器如何“感知”世界?——从传感器到多模态融合
【学习目标】
1. 理解具身智能的感知是通过传感器主动采集环境数据
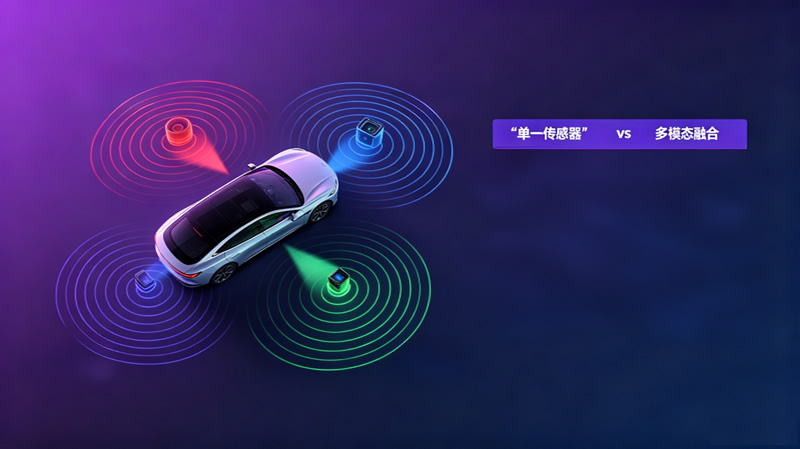
2. 能够对比单一传感器与多模态传感器协同采集数据的差异
3. 分析传统智能设备的被动感知与具身智能主动适配感知的本质区别
【情境导入】
智能农业大棚中的灌溉系统,会根据土壤湿度情况实现自动浇水;智慧校园里智能光照系统会随着环境光线调节亮度;无人驾驶汽车能实时检测前方行人和障碍物并避让。这些智能设备之所以能够感知周围环境,主要依赖于各类传感器对环境数据的实时采集。但同样是采集数据,传统智能设备和具身智能的“感知”方式却有着本质区别。
【知识大揭秘】
概念引入:传感器——机器的“感觉器官”
就像人类通过眼睛看、耳朵听、皮肤感受来认识世界,具身智能依靠各类传感器构建感知系统。常见的传感器包括:超声波传感器用于测量距离,光线传感器用于检测环境光照强度,温度传感器用于监测空气温度和湿度,土壤湿度传感器用于测量土壤湿度。这些传感器可以单独或协同工作,为智能体提供丰富的环境感知数据。
深度解析:被动感知 vs 主动适配感知
案例时间:无人驾驶汽车的“全方位感知”系统
知识小结:两种感知的三大区别
【AI看图学】

【动手练一练】
活动:超声波传感器测距实验
活动目标:通过实践活动深化对本课知识的理解,培养动手能力和分析思维
步骤:
1. 将超声波传感器连接到智能终端板并烧录测距程序
2. 分别在障碍物距离5cm、10cm、20cm、30cm处测量并记录
3. 改变障碍物角度(向左/右倾斜30°),重复测量
4. 分析误差变化,讨论超声波“回声定位”原理的局限性
工具/平台:智能终端板、超声波传感器、数据线、直尺、障碍物
预期成果:实验记录表,包含不同距离和角度下的测量值与误差分析
【想一想·辨一辨】
1. 如果你的眼睛只能看到黑白两种颜色(像超声波传感器只能测距离),你的生活会受到什么影响?这说明了什么道理?
2. 手机的人脸识别功能属于被动感知还是主动适配感知?为什么?
【拓展阅读·前沿视窗】
了解激光雷达(LiDAR)的工作原理,它是无人驾驶汽车最重要的传感器之一,通过发射激光脉冲并接收反射来构建3D环境地图。传感器工程师是具身智能领域的基础性职业,负责设计和优化各类传感器系统。
学完本课了?来检验一下学习成果吧!
🎯 去练习


